1月8日に名古屋大学工学研究科と共同実験が行われました(テスト)
2024年01月01日
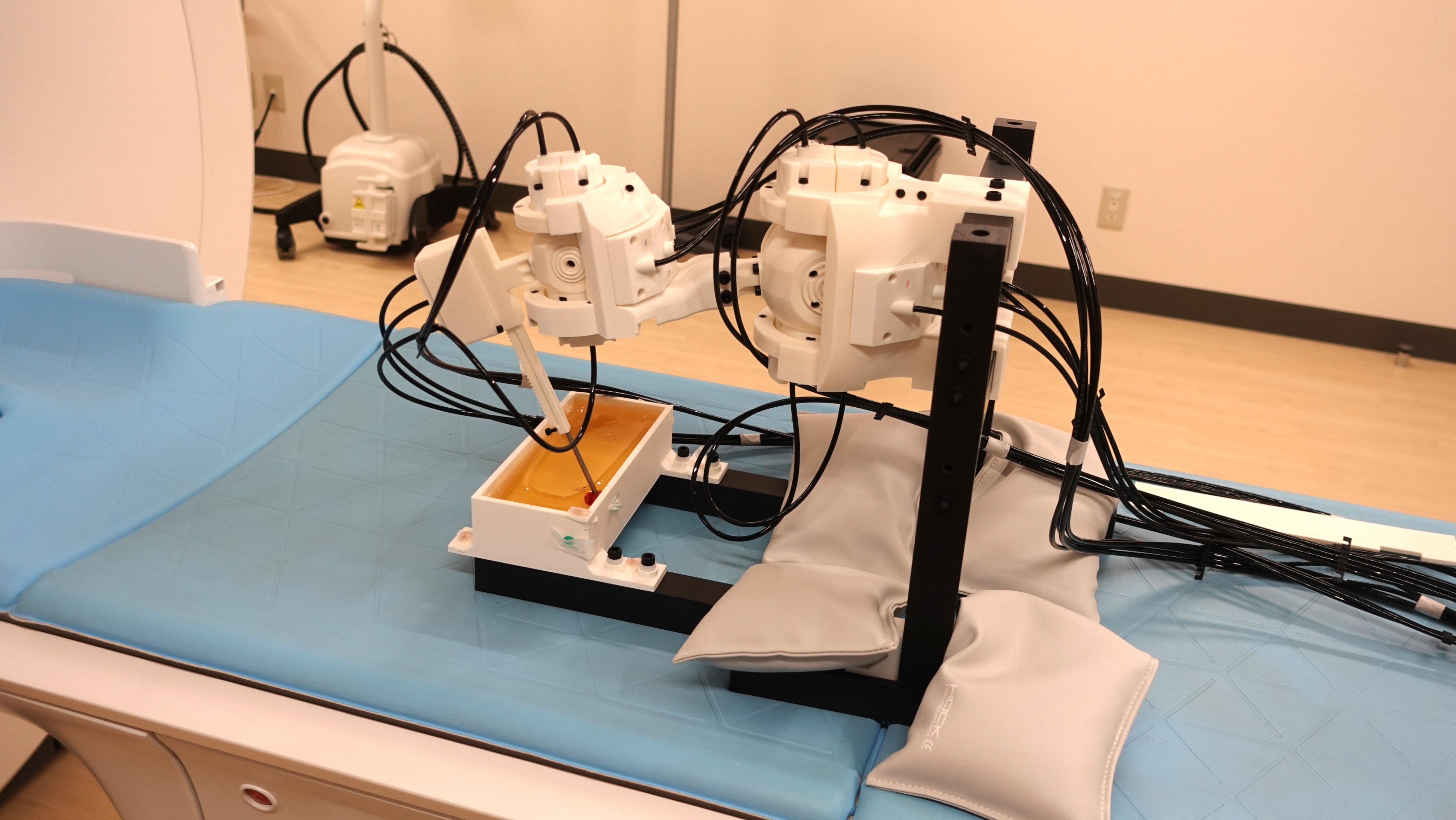
【図1. 名古屋大学工学研究科 部矢先生のグループが作成した遠隔穿刺ロボット】
東海中央病院では,2025年から名古屋大学メディカルxRセンターとの連携のもとに,センサ非装着型モーションキャプチャー機器を用いたリハビリや,VR技術を用いた治療介入などの共同研究が始まっています.xRセンターは,医工・産学連携による医療技術/機器開発の一拠点であり,関連施設である東海中央病院では,市中医療機関における実証実験や臨床試験の場として期待されています.
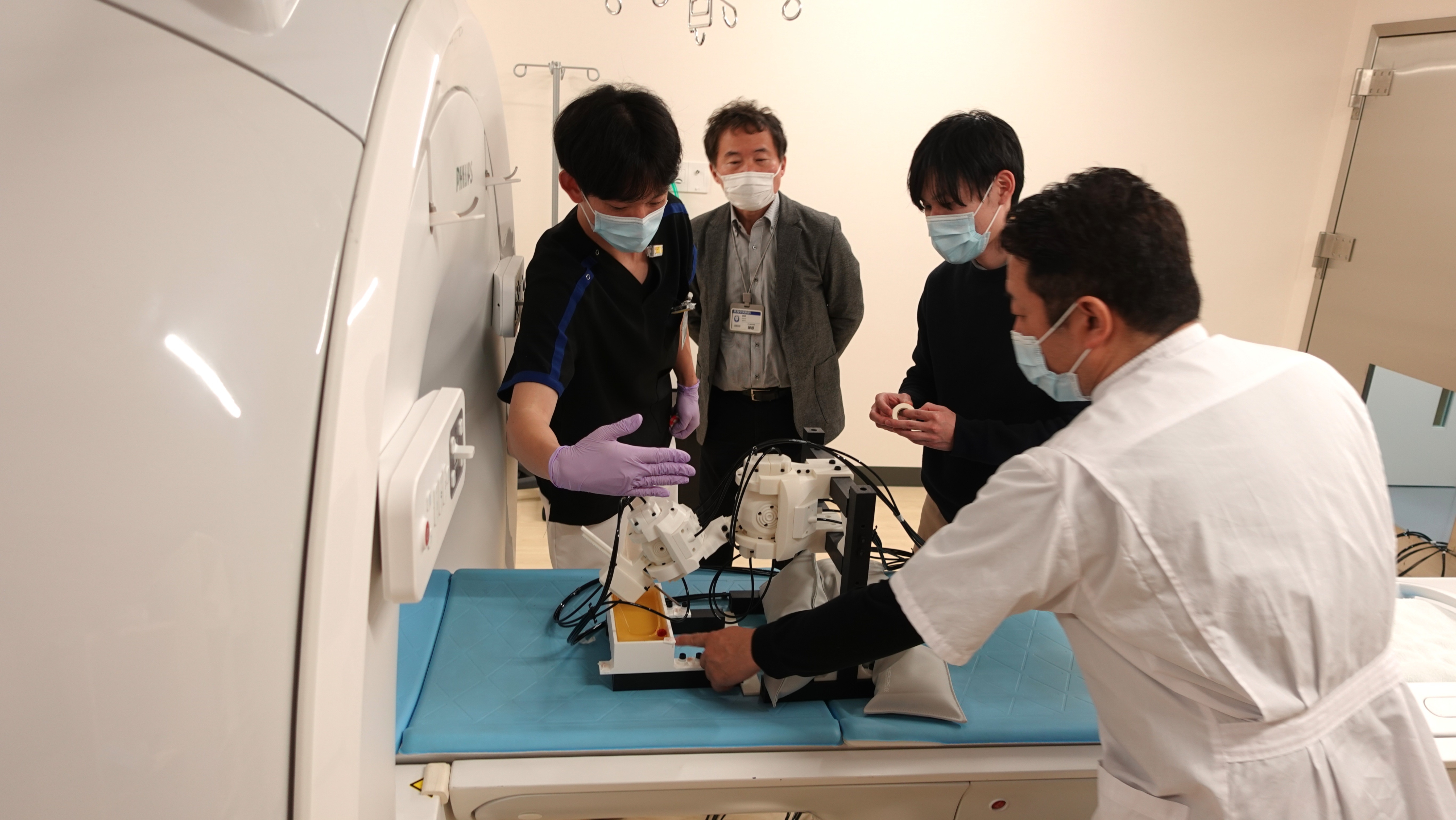
【図2. 実験前打合せ(放射線部の前野さん,吉田さん,そして,部矢研究室の森田さんもおつかれさまでした)】
このたび,名古屋大学工学研究科において開発中のMRI下遠隔操作が可能な医療機器の動作実験が行われました.その内容を簡単に紹介します.
名古屋大学大学院工学研究科の部矢先生のグループは,かねてMRI/CTなどの限られた空間において様々な方向に回転可能な球状歯車型空圧モータを開発しましたが,この空圧モータは,金属を用いず樹脂のみで製作できるので,特にMRI下で動作する小型ロボットに有用と考えられていました.

【図3. MRI装置内の穿刺ロボット1】
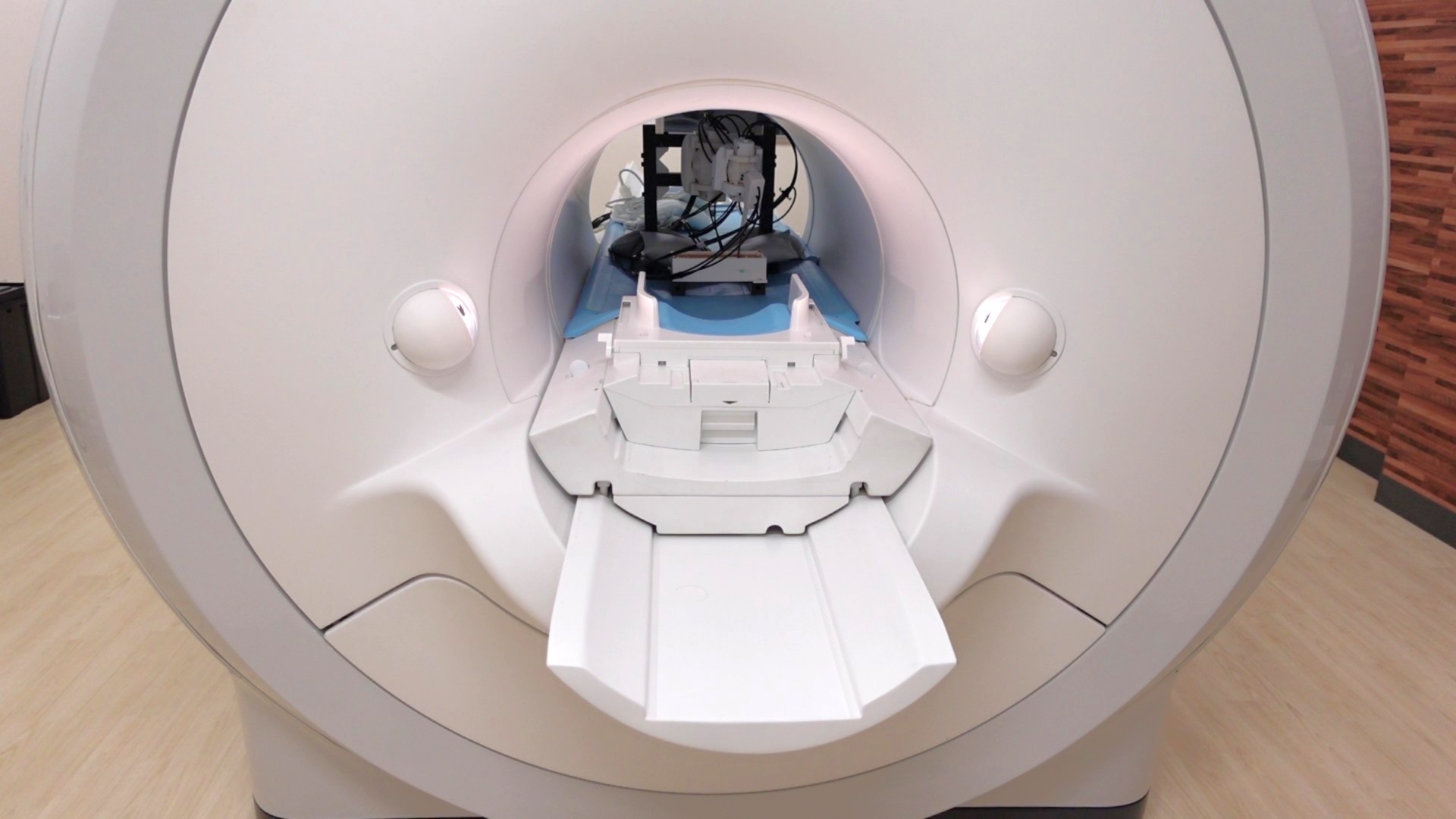
【図4. MRI装置内の穿刺ロボット2】
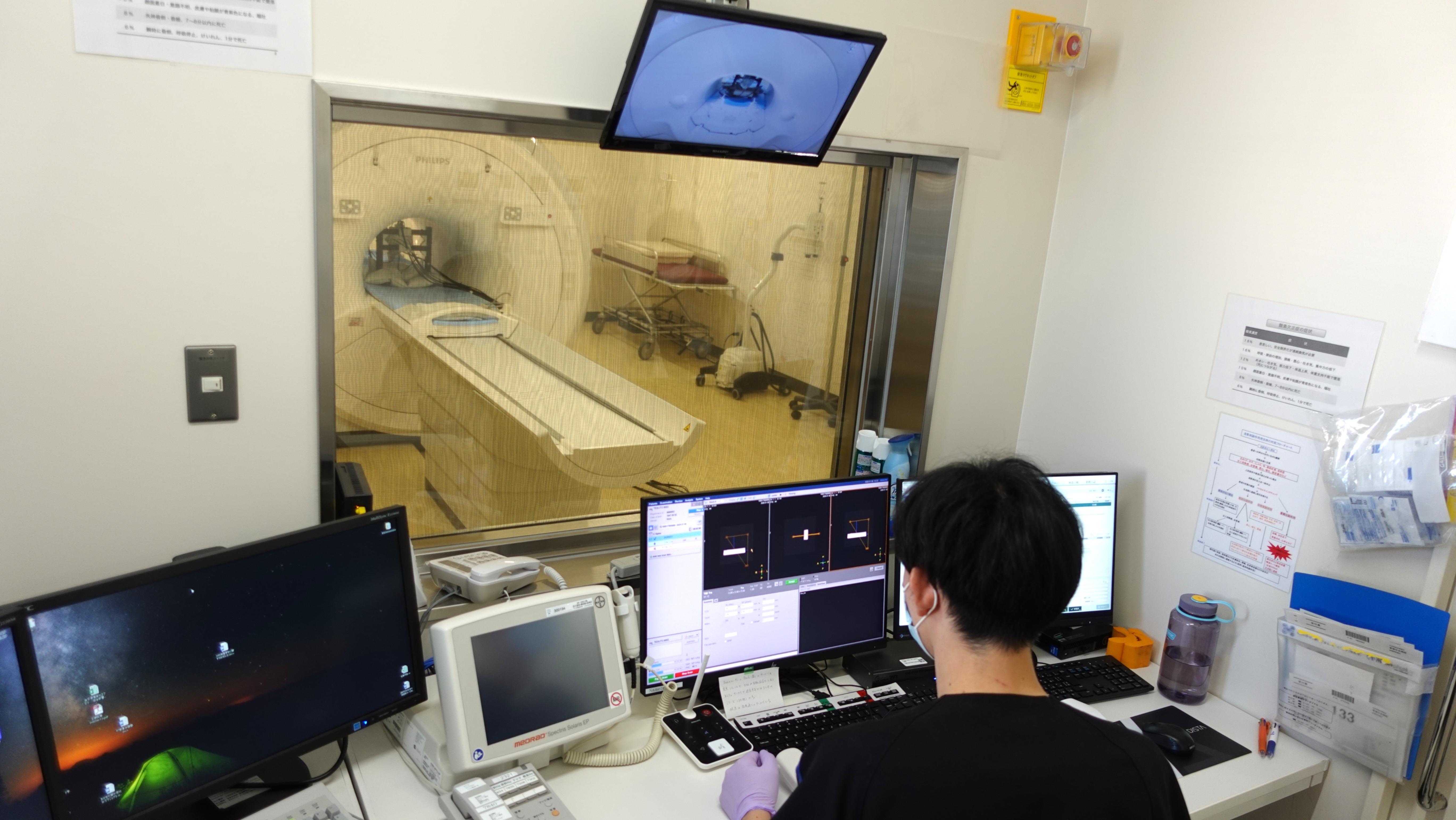
【図5. 操作室(画像構成中の吉田主任診療放射線技師)】
今回,将来のMRIガイド下治療/検査用ロボット開発を念頭に,強磁場下で動作可能な完全に磁性物フリーの穿刺装置を試作し,当院放射線部と共同で,1月8日に動作実験を行いました.結果は,ファントム(擬似臓器)内のターゲットに,見事,穿刺することができました(図1-6).
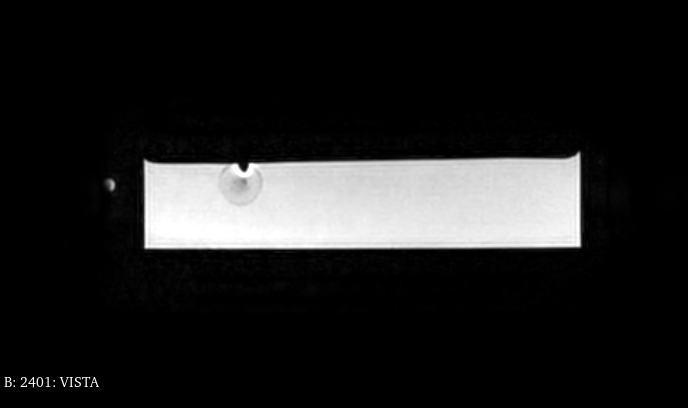
【図6. 標的擬似病変を穿刺したMRI画像】
MRIガイド下の穿刺ロボットは,脳外科,肝臟,前立腺などで有用で,この10年ほど,世界じゅうで開発が行われてきましたが,いまだ決定的な機器/システムは無いと言って良いと思います.名古屋大学発の本システムも,今回の実験の成功で,実用化に向けて大きな一歩を踏み出したと言えるでしょう.